
Bei unserem ersten Roboter-Entwurf haben wir uns an den Hinweisen für gutes Robot-Design der Nano-Giants e.V. orientiert. Hier einmal eine kleine Übersicht:
Die gesamten Tipps von Nano-Giants e.V. zum Hardware Design findet ihr hier.




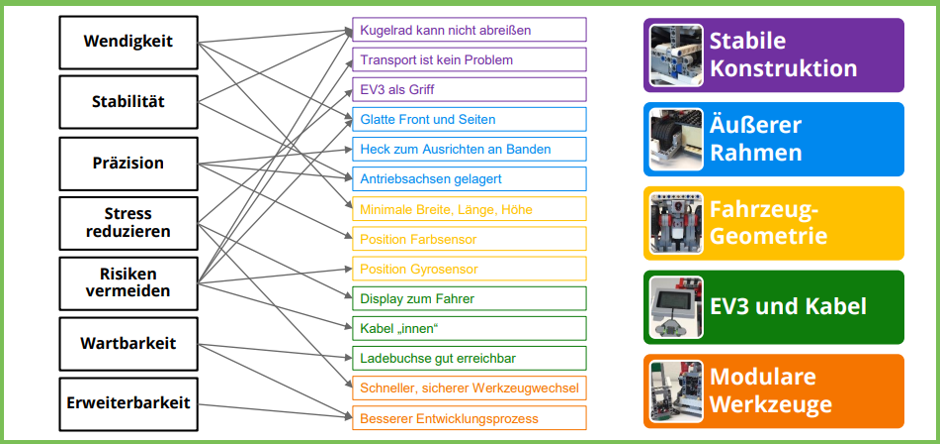
Was war uns wichtig?
- Der Roboter sollte möglichst klein werden. -> Damit er gut auf dem Feld manövrieren kann und überall durchkommt.
- Der Roboter sollte 2 Farbsensoren haben und einen Gyrosensor. -> Damit kann er einer Linie schnell folgen und gezielt geradeaus fahren. Außerdem kann er sich mit 2 Farbsensoren an einer Linie ausrichten.
- Die Farbesensoren sollten direkt vor den Motoren sitzen. -> Ansonsten kann er sich nicht gut an den Linien ausrichten.
- Der Gyrosensor soll so sitzen, dass er links/rechts-Verschiebungen messen kann und keine Höhenunterschiede.
- Für den Antrieb haben wir große Motoren genutzt -> mehr Kraft, schneller Fahren
- Für die Werkzeug-Schnittstelle haben wir kleine Motoren genutzt -> wenig Platz, dafür bringen sie aber auch weniger Kraft auf
- Um den Roboter herum haben wir Platten angebracht, damit die Seiten möglichst glatt sind und der Roboter sich an der Bande ausrichten kann.
- Für die Werkzeugschnittstelle haben wir einen Rahmen genutzt und für den Antrieb ein Kreuzrad. Werkzeuge haben sich damit leicht aufstecken lassen, und die Kreuzräder haben sich selbst ausgerichtet. -> Wenn man ein Werkzeug an den Rahmen angebracht hat, konnte es passieren, dass beim Abnehmen die Stecker am falschen Rahmen stecken blieben. Das kostet Zeit beim Werkzeugwechsel.